메카넘 휠 조립 방법
메카넘 휠의 A타입·B타입을 소개하고, 로봇이 정확하게 움직이도록 올바른 방향으로 조립하는 방법을 안내합니다.
01. 메카넘 휠 소개
조립에 필요한 부품

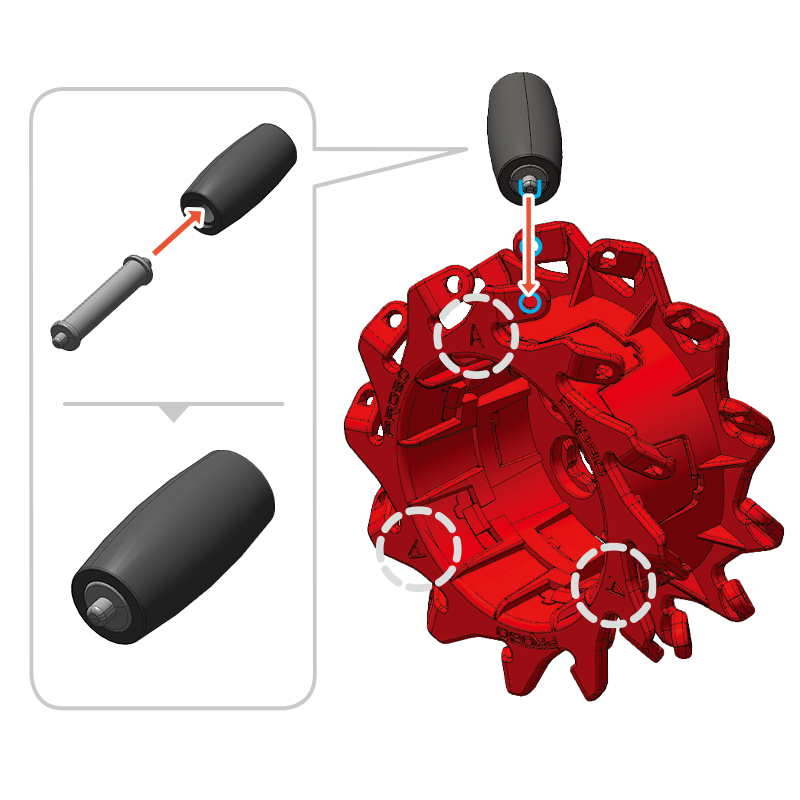
타이어
12개
휠 테두리에 비스듬히 배치되는 롤러. 휠 1개당 6개씩 사용

휠핀
12개
타이어를 휠 본체에 고정하는 핀. 타이어 1개당 1개씩 사용
A
A타입롤러 방향: /
정면에서 봤을 때 롤러가 왼쪽 아래→오른쪽 위(/) 방향으로 배치된 타입이에요. 로봇 앞 오른쪽·뒤 왼쪽 위치에 장착해요.
B
B타입롤러 방향: \
정면에서 봤을 때 롤러가 왼쪽 위→오른쪽 아래(\) 방향으로 배치된 타입이에요. 로봇 앞 왼쪽·뒤 오른쪽 위치에 장착해요.
A타입과 B타입 모두 조립 방법은 동일해요. 타이어 6개를 휠핀으로 하나씩 고정하면 됩니다.
02. 조립 방향 주의
휠의 조립 방향이 바뀔 경우, 로봇이 다르게 동작할 수 있으니 A휠과 B휠의 방향에 주의해서 조립해요.
휠 배치 방향 — 로봇을 위에서 내려다본 모습
앞 왼쪽 = B타입 · 앞 오른쪽 = A타입 · 뒤 왼쪽 = A타입 · 뒤 오른쪽 = B타입. 5mm 볼트 1개로 모터 샤프트에 결합해요.
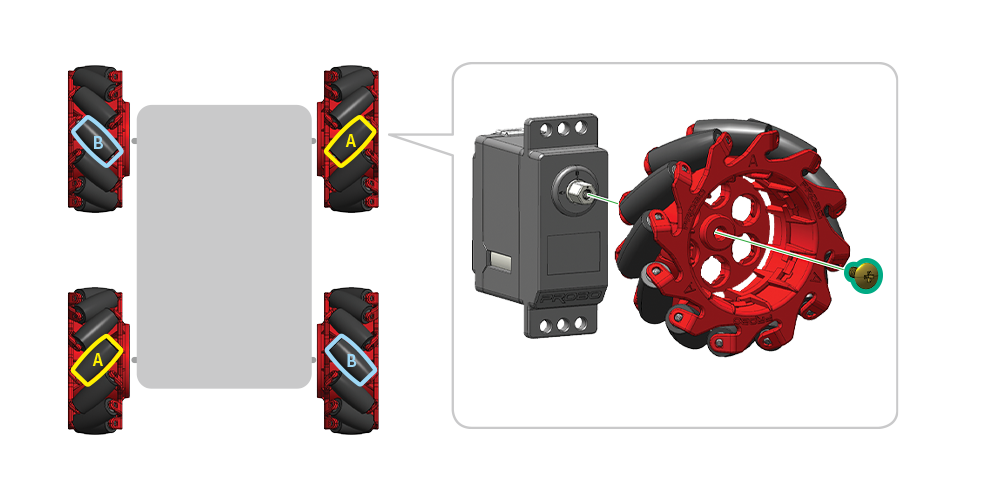
※ 로봇을 4륜으로 구동 시 메카넘 휠의 A타입 2개, B타입 2개가 필요해요.
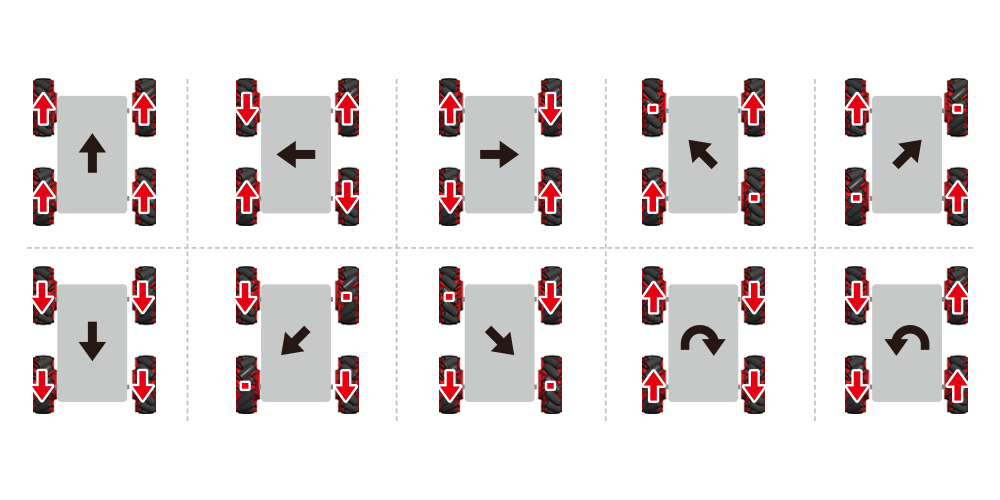
방향별 휠 회전 조합 (총 10가지)
앞·뒤·좌·우·좌대각선 앞/뒤·우대각선 앞/뒤·제자리 좌회전/우회전 등 메카넘 휠만의 전방향 이동이 가능해요.