FAQ
자주 묻는 질문과 답변입니다.
CPU 블럭에 배터리 점퍼가 꽂혀있는지 확인해 주세요. 배터리가 두 개 연결 될 경우에만 점퍼를 제거하세요.
- 배터리 1개 연결 시 → 점퍼 장착
- 배터리 2개 연결 시 → 점퍼 제거
USB 드라이버를 재설치해 주세요.
- USB 다운로더를 CPU에 연결한 후 PROBO HEX 프로그램을 실행해요.
- 프로그램이 실행되면 아래로 스와이프하여 DRIVER DOWNLOAD를 선택해요.
- 검은색 USB 드라이버 설치를 클릭합니다. ※ 하얀색 USB 드라이버일 경우 구형이므로 보상판매를 통해 신형으로 교체해 주세요.
- INSTALL 버튼을 클릭합니다.
- 잠시 후 설치가 완료됩니다. (Driver install success!)
- 드라이버 설치 후 정상적으로 연결되지 않으면 UNINSTALL 후 다시 INSTALL 합니다.
⚠ 커넥트는 방과 후 수업 교구이기 때문에 제품 구성에 USB 다운로더는 포함되어 있지 않습니다.
※ 개인 사용자는 별도로 구매하여 이용하시기 바랍니다.
- 리모컨 건전지의 +, - 가 올바르게 장착되었는지 확인해 주세요.
- 리모컨이 해당 로봇에 제대로 페어링이 되어있는지 확인해 주세요. 페어링이 제대로 잡히지 않을 경우 LED가 느리게 깜빡거려요.
RF 페어링 하기
- 처음 페어링 하는 방법 — RF 리모컨과 CPU 블럭의 전원을 켠 후, RF 리모컨과 RF 수신 보드의 페어링 스위치를 누르면 LED가 빠르게 깜빡거리면서 서로의 신호를 찾아요.
- 페어링 등록 완료 — RF 리모컨과 RF 수신 보드의 LED가 깜빡거리지 않고 계속 켜져 있으면 페어링이 완료된 거예요. RF 리모컨의 버튼을 누를 때, RF 수신 보드의 파란 수신 LED가 켜지는지 확인해요.
- 페어링 했던 로봇은 자동으로 연결 — 한 번 페어링했던 로봇은 전원을 껐다 키면 자동으로 기존 등록된 리모컨의 신호를 찾아 연결해요.
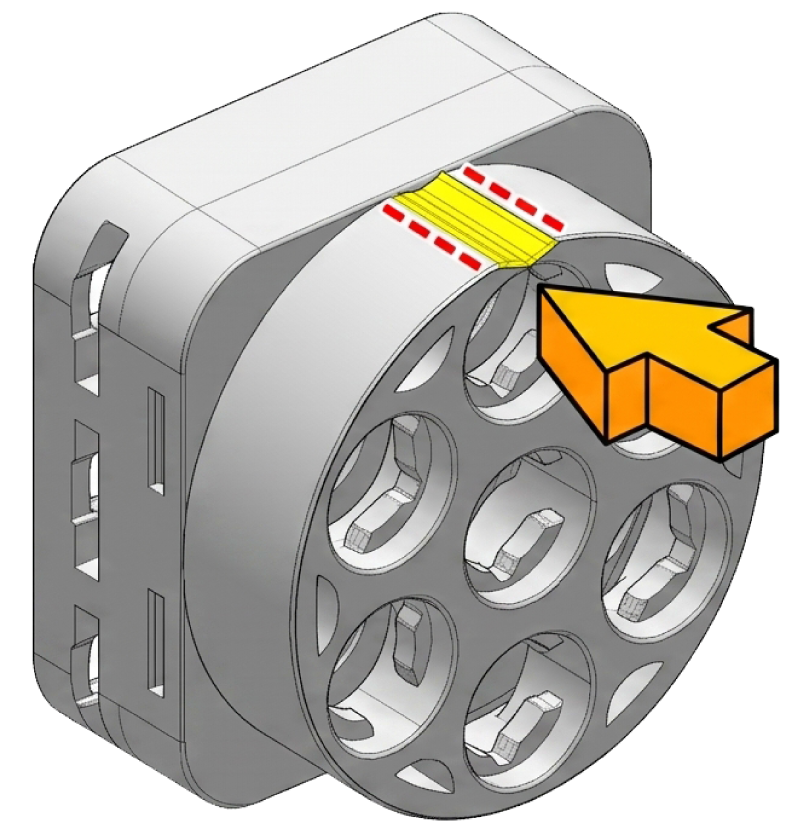
노란색으로 표시된 홈 부분의 각도에 주의해서 조립합니다. 각도가 맞지 않으면 로봇이 제대로 움직이지 않습니다.
모터 홈 방향
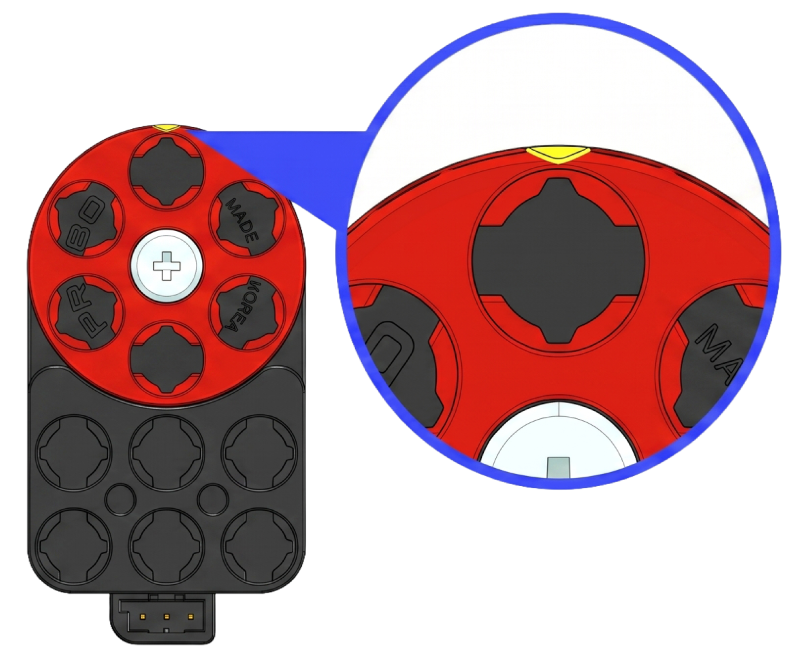
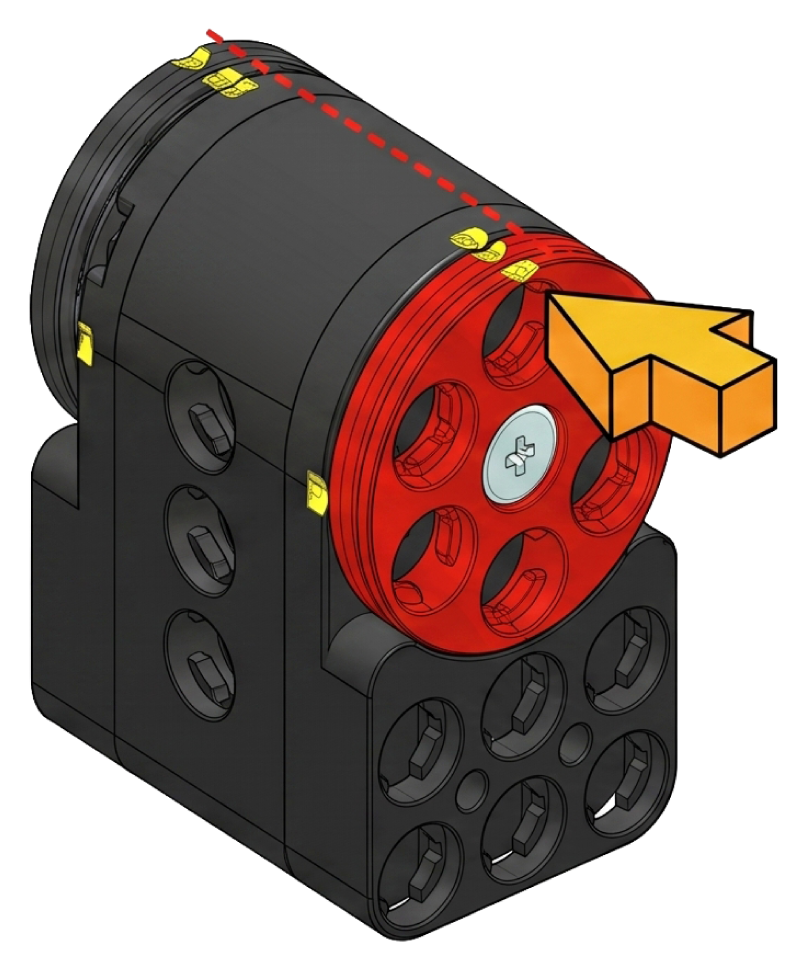
- 노란색 홈 부분의 각도를 확인합니다.
- 홈 방향이 맞지 않으면 모터를 분리 후 다시 조립합니다.
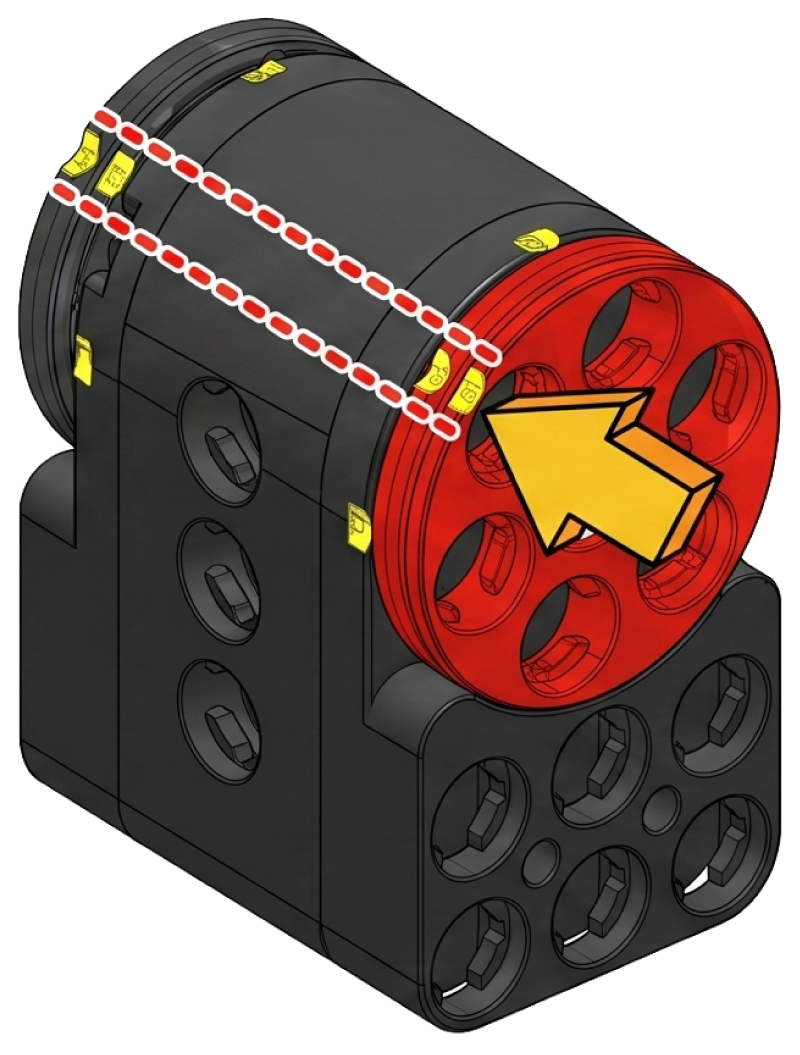
프레임 홈 방향
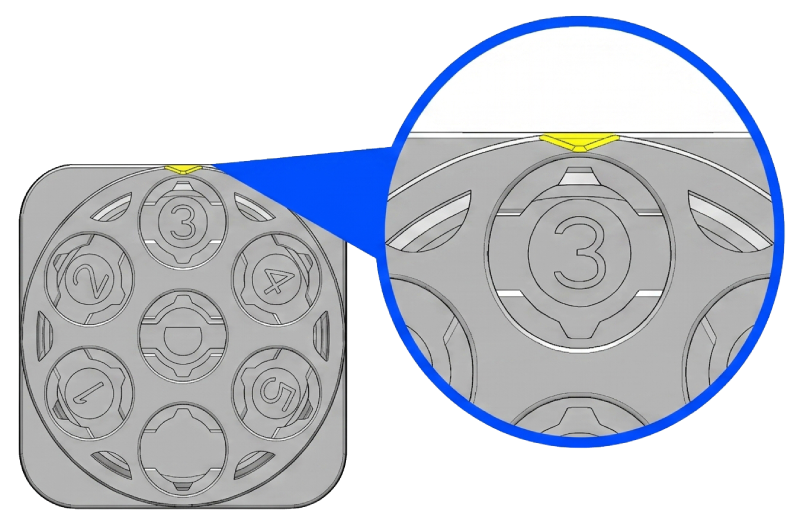
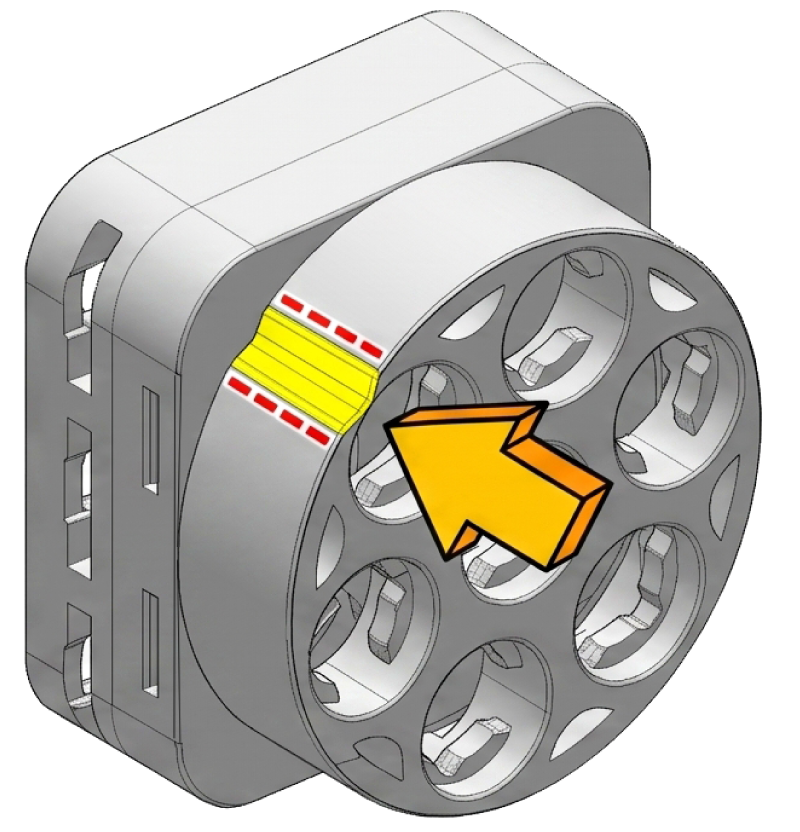
- 노란색 홈 부분의 각도를 확인합니다.
- 프레임 홈 방향이 맞지 않으면 분리 후 다시 조립합니다.
- 로봇을 사용하지 않을 때 배터리 블럭의 건전지를 분리해 주세요.
- 망간 건전지가 아닌 알카라인 건전지를 사용해 주세요.
- 사용하던 건전지와 새 건전지를 섞어서 사용하지 마세요.
- ALUX 코딩 앱(블록 코딩)과 스크래치 3.0을 지원합니다. 텍스트 코딩이 필요한 경우 별도 가이드를 참조하세요.
- 커넥트는 윈도우, 안드로이드 환경에서 사용 가능합니다. (애플 제품 계열과 그 외 OS는 사용 불가)
교육용 로봇 키트로서 적절한 정밀도를 제공합니다. 기어 백래시와 센서 오차 범위는 각 부품 사양표를 참고해 주세요.

