FAQ
常见问题与解答。
请确认CPU块上是否插有电池跳线。 仅在连接两个电池时才拆除跳线。
- 连接1个电池时 → 安装跳线
- 连接2个电池时 → 拆除跳线
请重新安装USB驱动程序。
- 将USB下载器连接到CPU后,运行PROBO HEX程序。
- 程序启动后,向下滑动并选择DRIVER DOWNLOAD。
- 点击安装黑色USB驱动程序。※ 白色USB驱动程序为旧款,请通过以旧换新更换为新款。
- 点击INSTALL按钮。
- 片刻后安装完成。(Driver install success!)
- 驱动安装后仍无法正常连接时,请先UNINSTALL再重新INSTALL。
⚠ Connect是课后授课教材,产品包装内不包含USB下载器。
※ 个人用户请另行购买使用。
- 请确认遥控器电池的+、-是否正确装入。
- 请确认遥控器是否与该机器人正确配对。配对不正确时LED会慢速闪烁。
RF配对方法
- 首次配对方法 — 打开RF遥控器和CPU块的电源后,按下RF遥控器和RF接收板的配对开关,LED会快速闪烁并寻找彼此的信号。
- 配对注册完成 — 当RF遥控器和RF接收板的LED不闪烁并持续亮起时,配对完成。按RF遥控器的按钮时,请确认RF接收板的蓝色接收LED是否亮起。
- 已配对机器人自动连接 — 一旦配对过的机器人,关机后再开机即可自动寻找已注册遥控器的信号并连接。
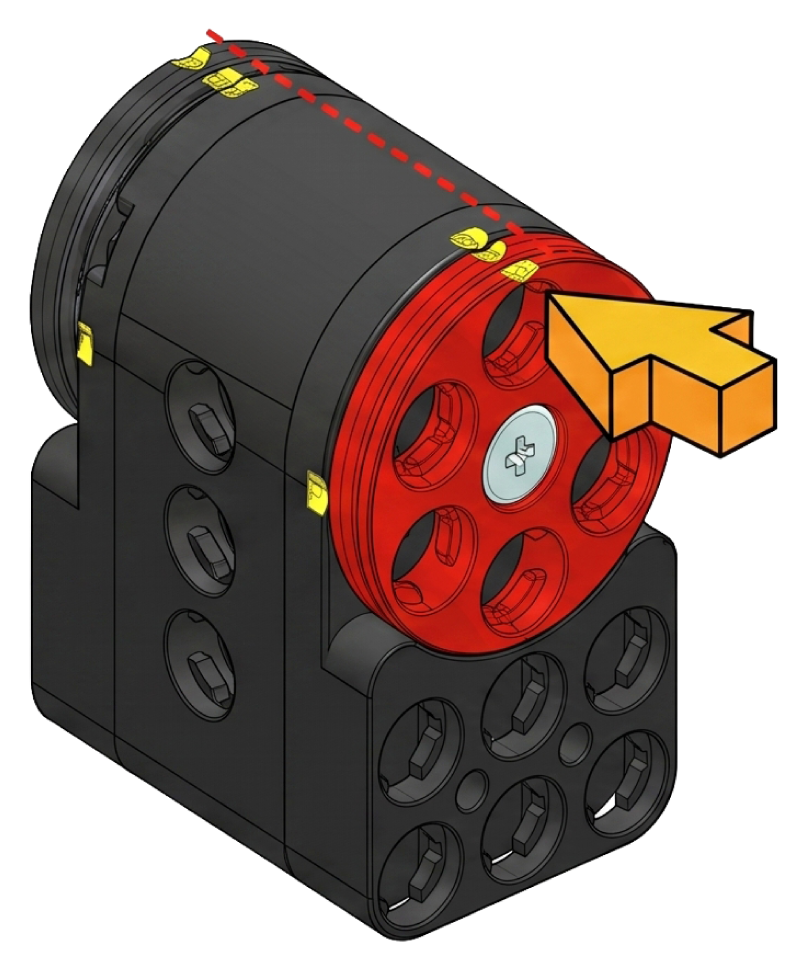
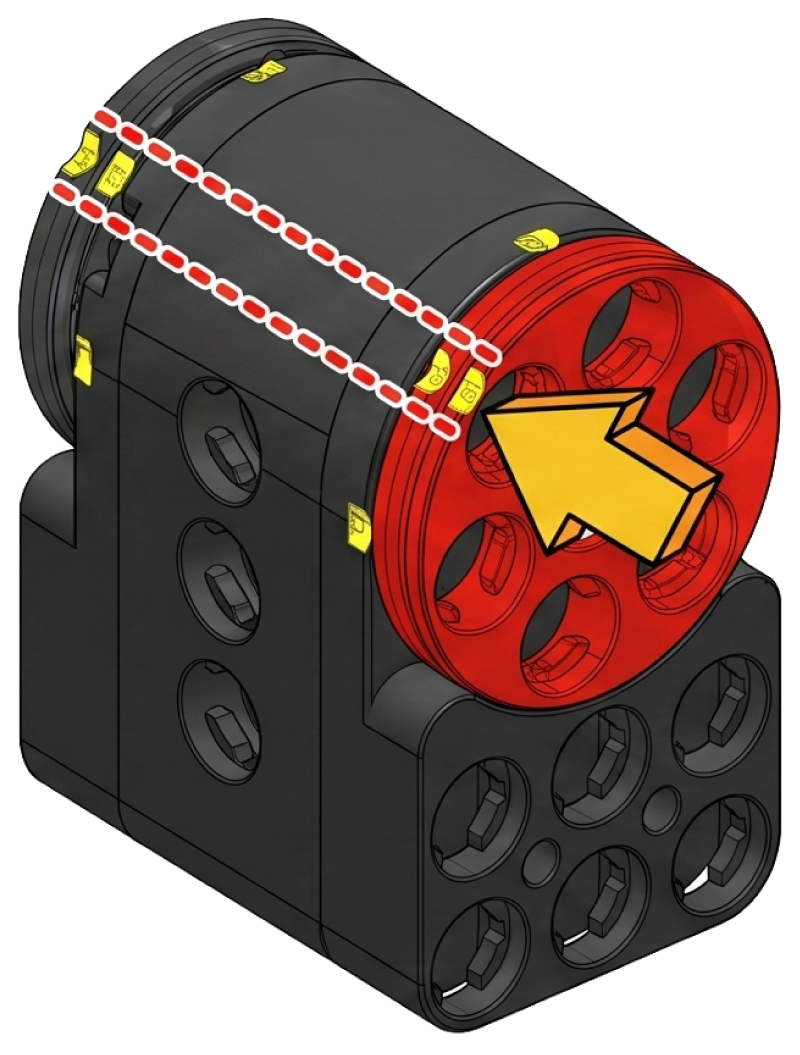
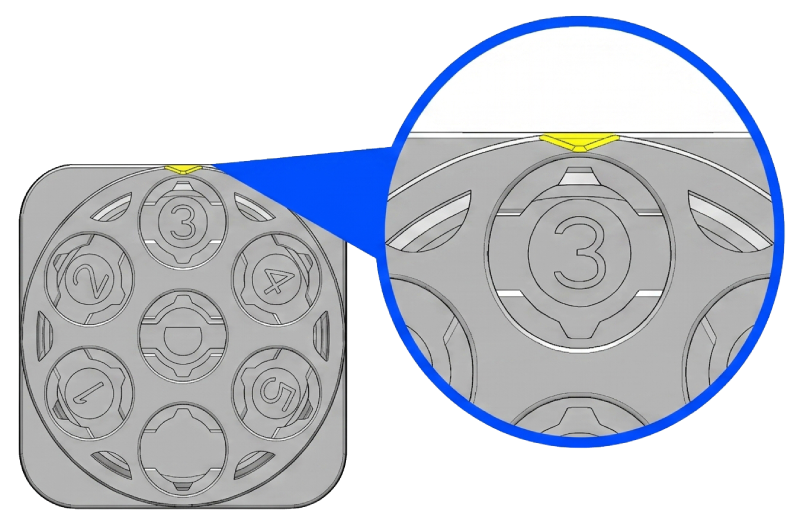
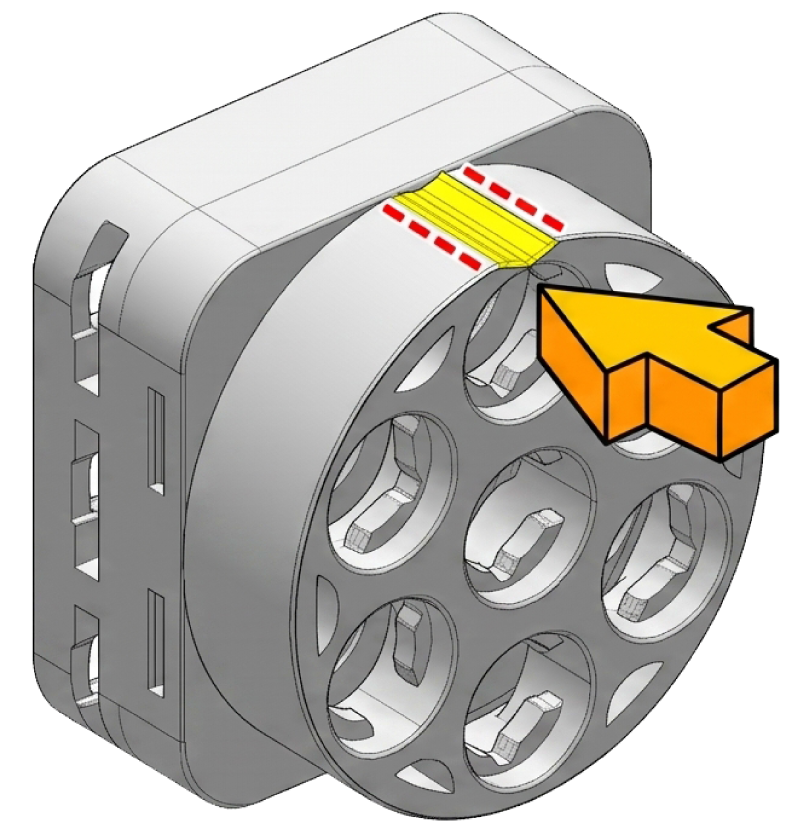
请注意黄色标记的凹槽部分的角度进行组装。角度不对时,机器人将无法正常动作。
电机凹槽方向
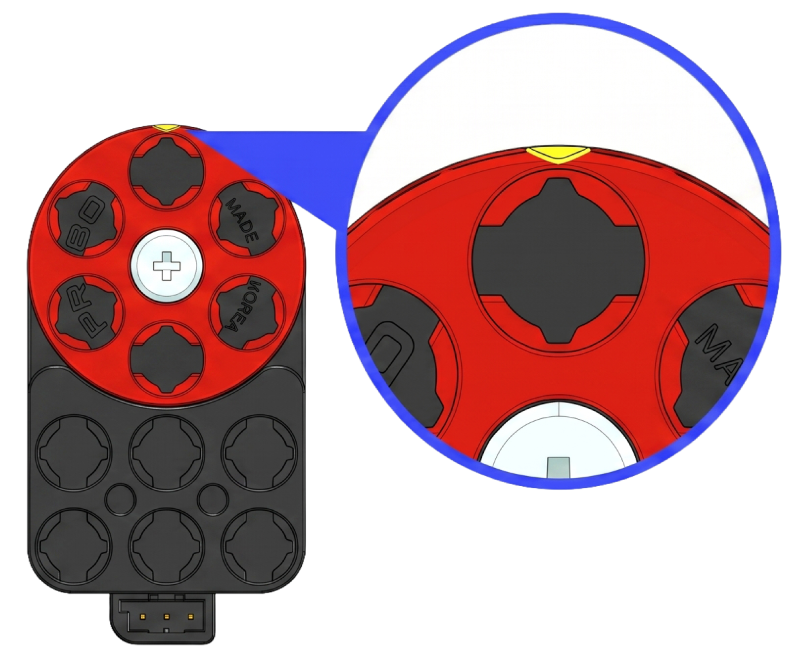
- 确认黄色凹槽部分的角度。
- 凹槽方向不对时,拆下电机重新组装。
框架凹槽方向
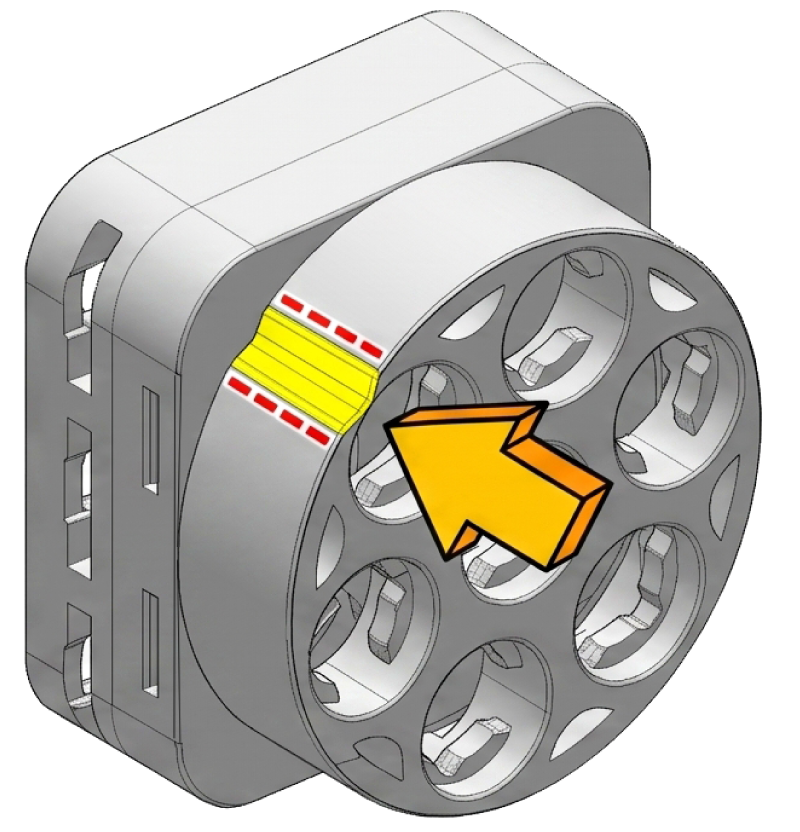
- 确认黄色凹槽部分的角度。
- 框架凹槽方向不对时,拆开重新组装。
- 不使用机器人时请取出电池块中的电池。
- 请使用碱性电池而不是锰电池。
- 请勿将使用过的电池和新电池混合使用。
- 支持ALUX编码应用(块编码)和Scratch 3.0。如需文本编码,请参考单独指南。
- Connect可在Windows、Android环境下使用。(不支持苹果产品系列及其他OS)
作为教育用机器人套件提供适当的精度。齿轮背隙和传感器误差范围请参考各零件规格表。

