FAQ
よくあるご質問と回答です。
CPUブロックにバッテリージャンパーが差し込まれているか確認してください。 バッテリーが2つ接続される場合のみジャンパーを取り外します。
- バッテリー1個接続時 → ジャンパー装着
- バッテリー2個接続時 → ジャンパー取り外し
USBドライバーを再インストールしてください。
- USBダウンローダーをCPUに接続後、PROBO HEXプログラムを実行します。
- プログラムが実行されたら下にスワイプしてDRIVER DOWNLOADを選択します。
- 黒いUSBドライバーのインストールをクリックします。※ 白いUSBドライバーの場合は旧型のため、下取り販売で新型に交換してください。
- INSTALLボタンをクリックします。
- しばらくしてインストールが完了します。(Driver install success!)
- ドライバーインストール後も正常に接続されない場合、UNINSTALLしてから再度INSTALLします。
⚠ コネクトは放課後授業用教材のため、製品構成にUSBダウンローダーは含まれていません。
※ 個人ユーザーは別途購入してご利用ください。
- リモコンの電池の+、-が正しく装着されているか確認してください。
- リモコンが該当ロボットに正しくペアリングされているか確認してください。ペアリングが正しくない場合、LEDがゆっくり点滅します。
RFペアリング方法
- 初めてペアリングする方法 — RFリモコンとCPUブロックの電源を入れた後、RFリモコンとRF受信ボードのペアリングスイッチを押すと、LEDが高速に点滅して互いの信号を探します。
- ペアリング登録完了 — RFリモコンとRF受信ボードのLEDが点滅せず継続して点灯していればペアリング完了です。RFリモコンのボタンを押した時、RF受信ボードの青い受信LEDが点灯するか確認してください。
- ペアリング済みロボットは自動接続 — 一度ペアリングしたロボットは電源を切って再度入れると、自動的に既に登録されたリモコンの信号を探して接続します。
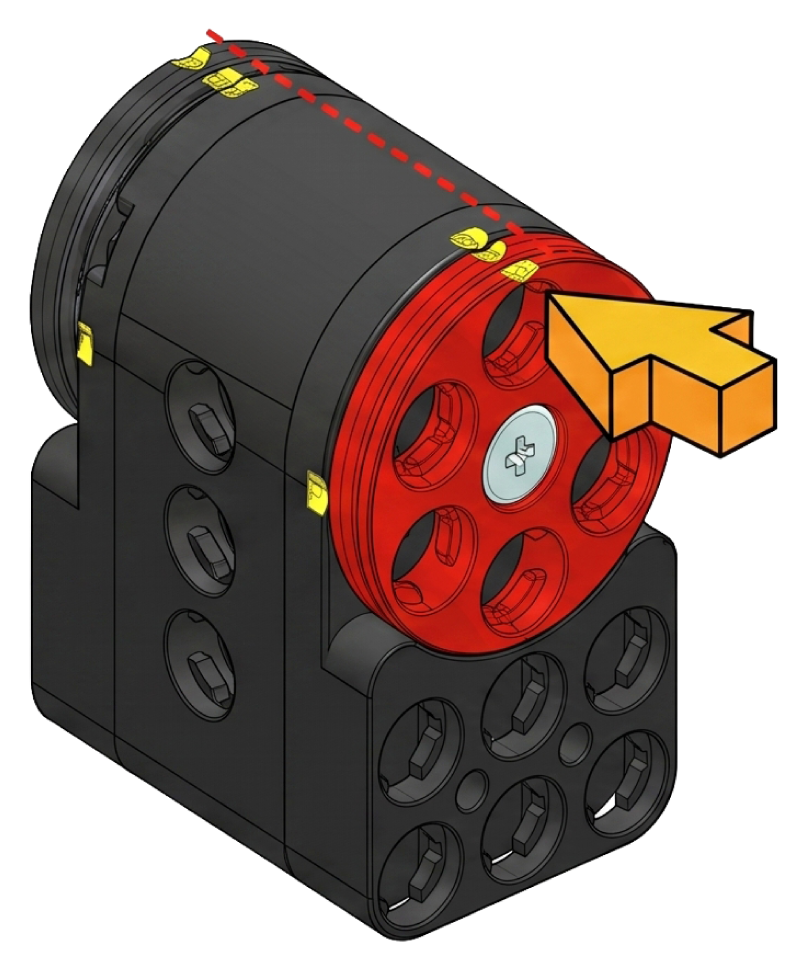
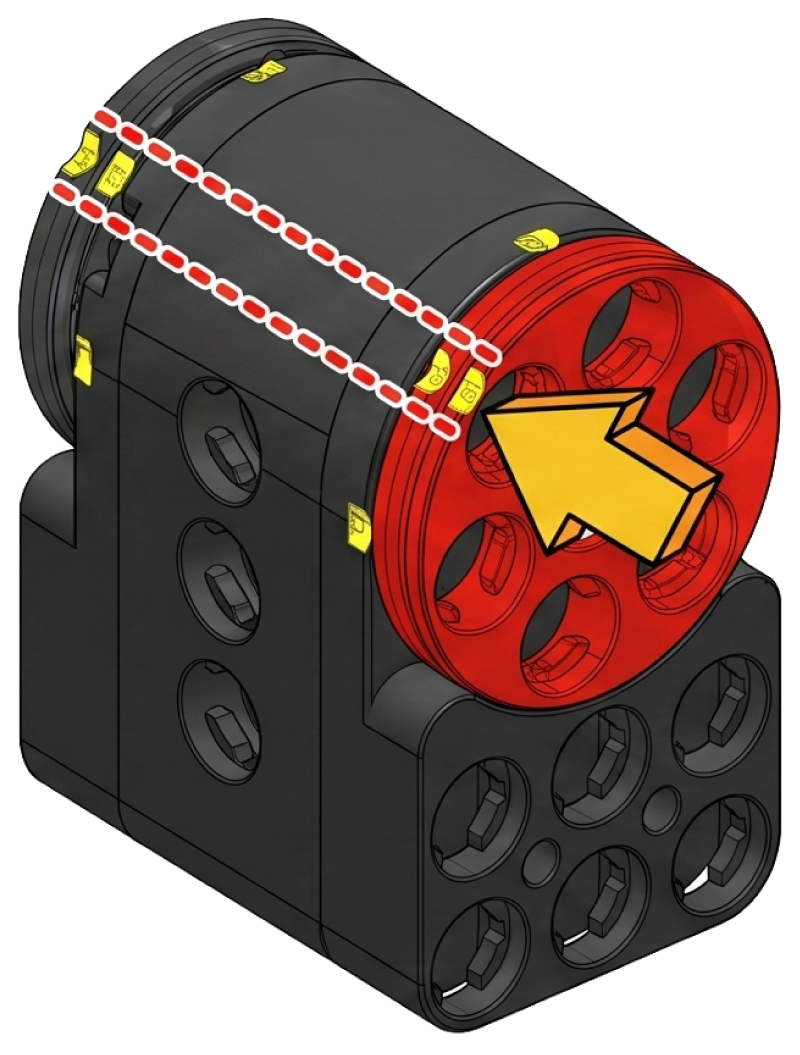
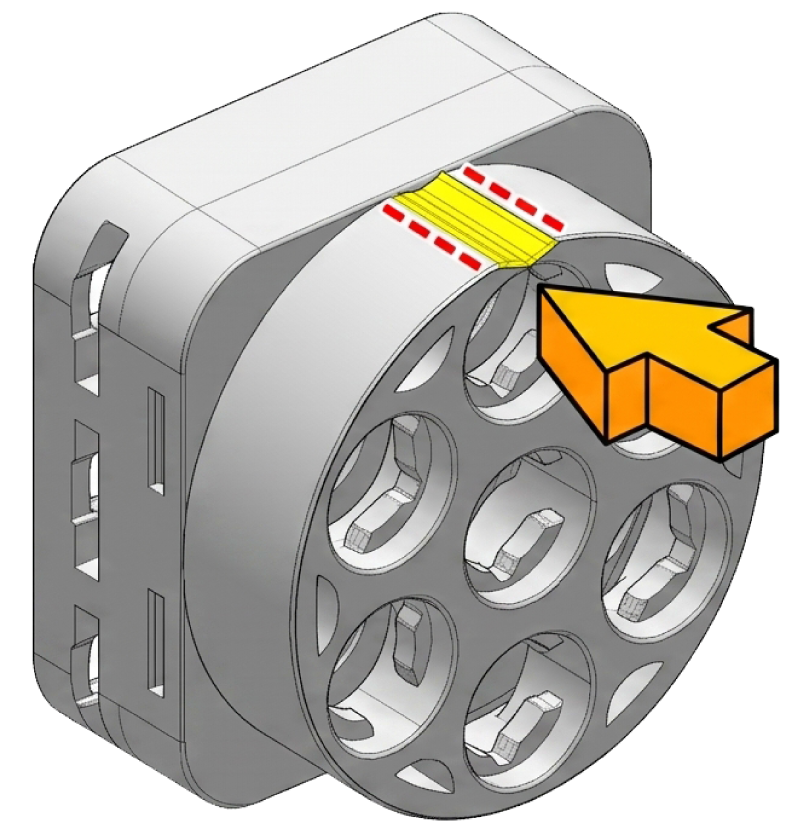
黄色で示されている溝の角度に注意して組み立ててください。角度が合わないとロボットが正常に動きません。
モーターの溝方向
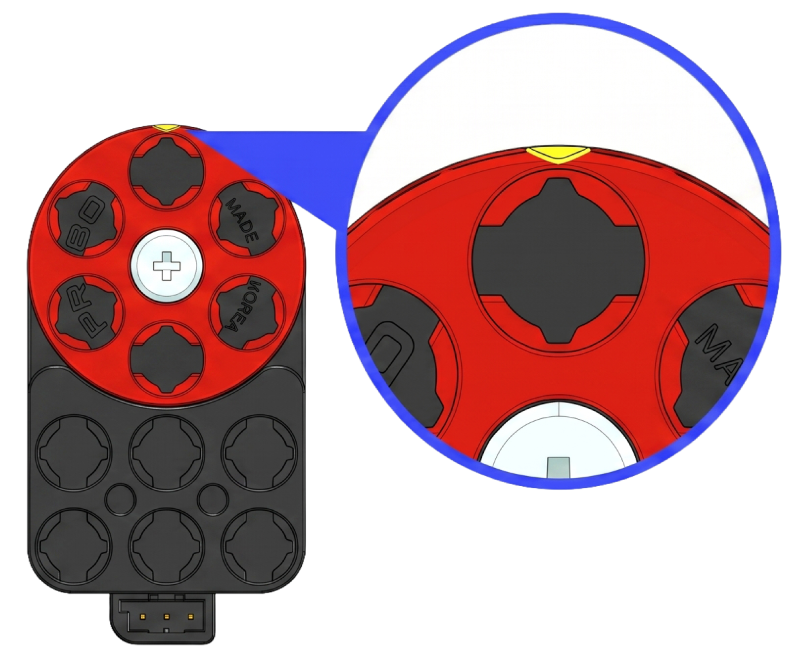
- 黄色い溝部分の角度を確認します。
- 溝の方向が合わない場合はモーターを取り外して再組立します。
フレームの溝方向
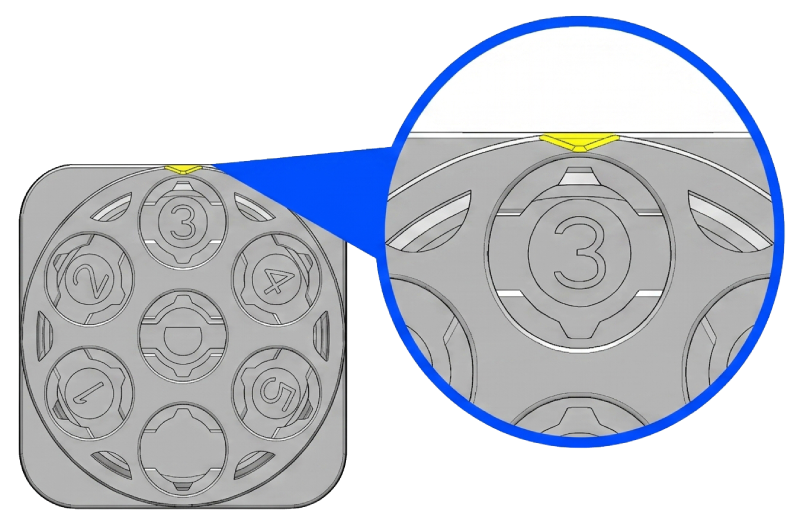
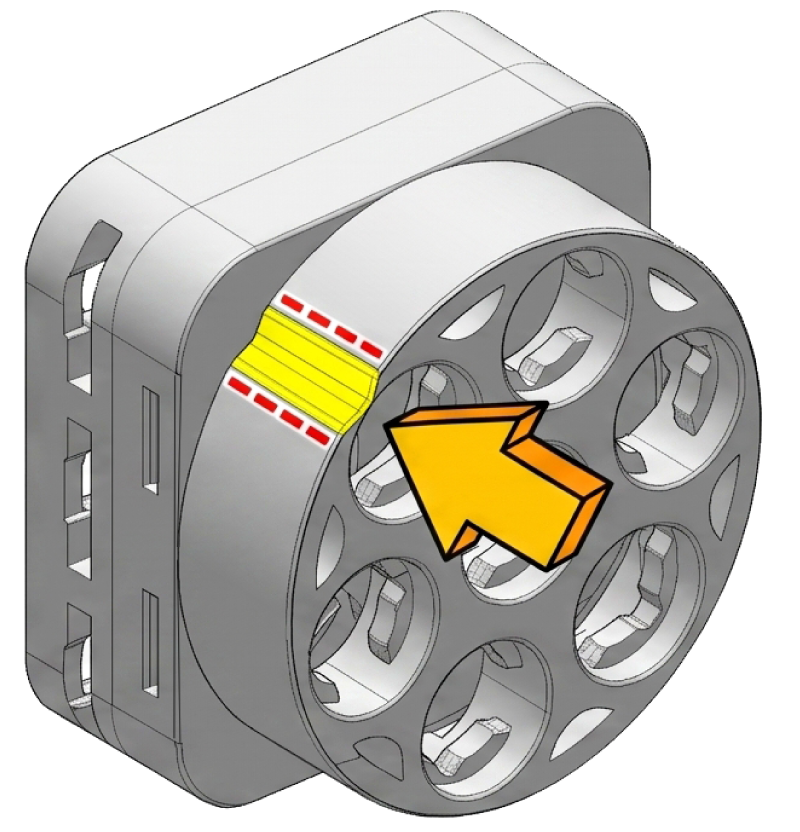
- 黄色い溝部分の角度を確認します。
- フレームの溝方向が合わない場合は取り外して再組立します。
- ロボットを使用しない時はバッテリーブロックの電池を取り外してください。
- マンガン電池ではなくアルカリ電池を使用してください。
- 使用済み電池と新しい電池を混ぜて使用しないでください。
- ALUXコーディングアプリ(ブロックコーディング)とScratch 3.0をサポートします。テキストコーディングが必要な場合は別途ガイドを参照してください。
- コネクトはWindows、Android環境で使用可能です。(Apple製品およびその他のOSは使用不可)
教育用ロボットキットとして適切な精度を提供します。ギアバックラッシュとセンサー誤差範囲は各部品の仕様表をご参照ください。

