How to assemble Mecanum wheels
Introduces Type A and Type B Mecanum wheels and guides correct-direction assembly so the robot moves accurately.
01. About Mecanum wheels
Parts needed for assembly

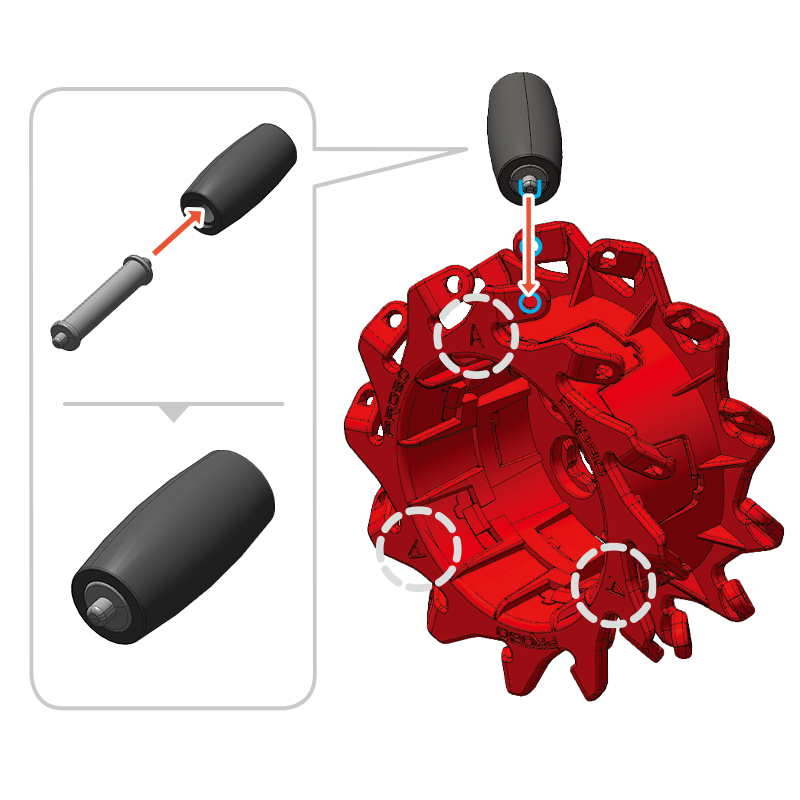
Tire
12
Rollers angled around the wheel rim. Six per wheel.

Wheel Pin
12
Pin that fixes a tire to the wheel body. One per tire.
A
Type ARoller direction: /
Viewed from the front, the rollers run from lower-left to upper-right (/). Mount on the front-right and rear-left of the robot.
B
Type BRoller direction: \
Viewed from the front, the rollers run from upper-left to lower-right (\). Mount on the front-left and rear-right of the robot.
Type A and Type B assemble the same way. Just fix six tires onto the wheel with wheel pins, one at a time.
02. Watch the assembly direction
If the wheel direction is reversed, the robot will move differently. Pay attention to A-wheel and B-wheel orientation when assembling.
Wheel layout — viewed from above the robot
Front-left = Type B · Front-right = Type A · Rear-left = Type A · Rear-right = Type B. Attach to the motor shaft with one 5 mm bolt.
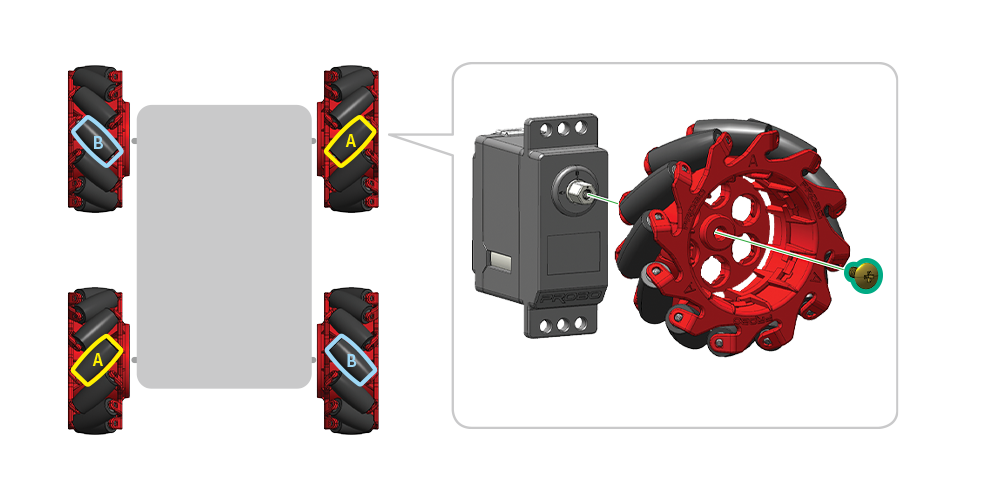
※ Driving a robot on four wheels requires two Type A and two Type B Mecanum wheels.
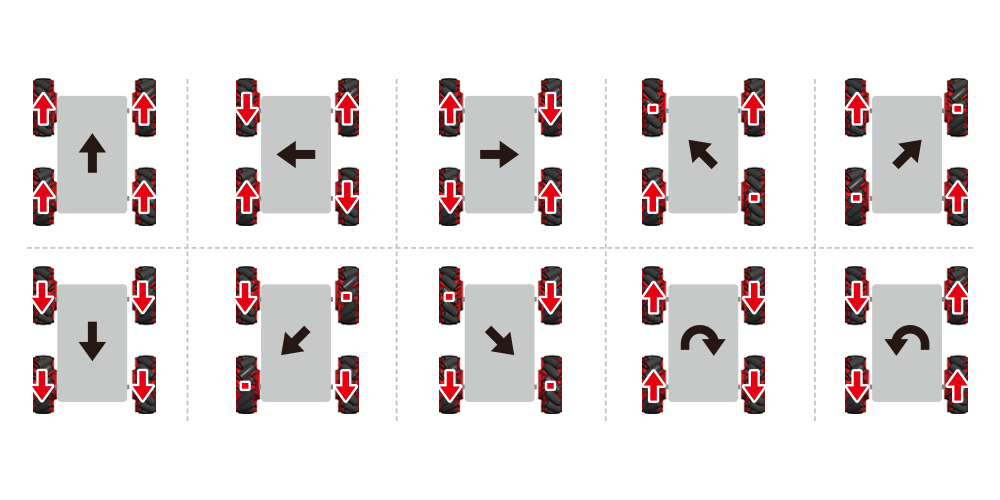
Wheel-rotation combinations by direction (10 total)
Forward, back, left, right, diagonal forward/back (left and right), and on-the-spot left/right rotation — Mecanum wheels make full omnidirectional motion possible.